





Описание
Pixhawk 2,1 UAV/UAS/ROV автопилот Контроллер полета
Очень ожидаемый Контроллер полета следующего поколения PIXHAWK PX4
• Интегрированный Контроллер полета с одной доской/коробкой.
• Достаточно ввода/вывода для большинства приложений без расширения.
• Улучшенная простота использования.
• Улучшенная производительность сенсора.
• Улучшенные микроконтроллеры.
• Повышенная надежность и снижение сложности интеграции.
• Сниженные спецификации и производственные затраты.
Ключ дизайн очков
• Все-в-одном с интегрированным FMU и IO и большим количеством портов ввода/вывода.
• Улучшенная технологичность, разработанная для более простого крепления и дизайна чехол.
• Отдельные блоки питания для FMU и IO (см. Раздел "энергоархитектура").
• Встроенный аккумулятор для FMU и IO SRAM/RTC.
• Интеграция со стандартным блоком питания.
Контроллер полета Pixhawk ГСМ основная плата
• STM32F427; flash 2MiB, ram 256KiB.
• Бортовой 16 КиБ SPI FRAM
• MPU9250 или ICM 20 xxxintegrated акселерометр/гироскоп
• MS5611 Баро
• Все датчики подключены через SPI.
• Интерфейсы Micro SD через SDIO.
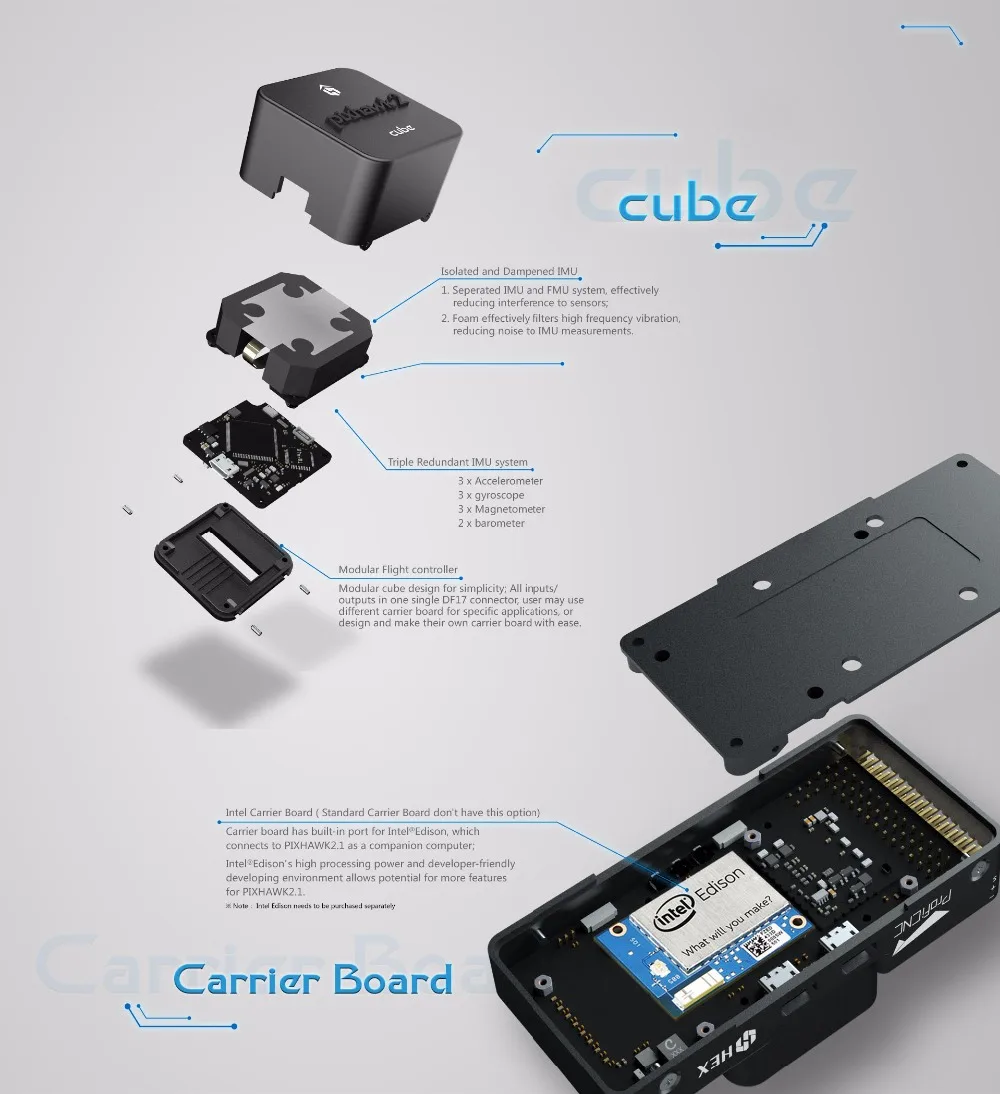
Вибрации с ограничителем и амортизатором и инерционным измерительным доска
• LSM303D встроенный акселерометр/магнитометр.
• L3GD20 гироскутер.
• MPU9250 или ICM 20xxx Gyro/Accel
• MS5611 Баро
• Все датчики подключены через SPI.
Порты ввода/вывода
• 14 сервовыходов PWM (8 от IO, 6 от FMU).
• Входы R/C для CPPM, Spektrum/DSM и S. Bus.
• Аналоговый/PWM RSSI вход.
• Сервопривод S. Bus.
• 5 последовательных портов общего назначения, 2 с полным контролем потока, два порта IEC
• Один порт SPI (не буферизированный, только для коротких кабелей не рекомендуется использовать).
• Два интерфейса CAN.
• 3 аналоговые входа
• Мощный Пьезозуммер. (на плате расширения)
• Мощный RGB светодиодный. (Совместим с драйвером iec, подключенным только внешне)
• Безопасный переключатель/светодиодный.
Список функций, измененных на Pixhawk 2 от Pixhawk
Три IMU
-Они состоят из 2 на плате IMU
-1 закреплен на FMU
Две Бортовые компасы
-Они состоят из 1 на плате IMU
-1 фиксируется на FMU
Два барос
-1 на IMU (этот Баро, скорее всего, будет удален в пользу выделенного внешнего барометра
-1 фиксируется на FMU
Двойной Мощность вход
-Это удаляет возможность избыточности с сервопривода и заменяет его с выделенной второй вилкой питания
-Для защиты от напряжений более 5,6 В добавлены Диод Зенера и FetAux вход 2
-Это только на "PRO" carrier board mini carrier board все еще рисует резервную копию от сервопривода.
Только 2 канала FMU PWM out на плате Mini carrier. (Всего 10 ШИМ)
Двойной внешний I2C
-Это позволяет подключать элементы к любому порту iec, что позволяет подключать два блока gps/Mag без коллизии Mags.
GPS_Puck с безопасной и светодиодный (доступно отдельно)
-Один блок gps/Mag/RGB/кнопка безопасности
Контроллер полета Pixhawk 2 ID оборудования
-I физический идентификатор оборудования был добавлен в I/O Pixhawk2. Для этого требуется программное обеспечение для идентификации платы в целях отладки. Это единственный непрограммный метод, чтобы отличить двух Pixhawks.
Дышащий светодиодный куб.Поставляется на твердом с настройками по умолчанию на pin. Подключен к PWM pin, и как таковой может быть сделан на звук,
Контакты для мониторинга питания теперь направляются к чипу ввода/вывода, Это позволит записывать события питания во время перезагрузки при засветке.
Brick OK, Backup OK, и FMU 3,3 V все подключены к цифровому контакту ввода/вывода через 220 Ом резистора.







Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Материал
- Комбинированный материал
- Номер модели
- Pixhawk 2.1
- Бренд
- SUNFLYING
- Тип транспорта
- Самолеты
- Характеристики
- Сборка
- Расходный материал для инструментов
- Сборное стекло
- Детали дистанционного управления и комплектующие
- Autopilot Flight Controller
- Периферийные устройства для дистанционного управления
- Autopilot Flight Controller
- Детали для тюнинга и запчасти
- Autopilot Flight Controller
Сопутствующие товары

16 827 руб.
9 заказов







